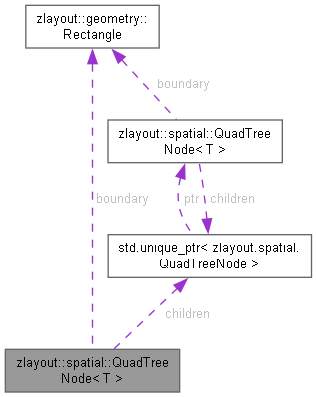
A node in the quadtree structure. More...
#include <quadtree.hpp>
Public Types | |
| using | ObjectType = T |
| using | BoundingBoxFunc = std::function<geometry::Rectangle(const T&)> |
Public Member Functions | |
| QuadTreeNode (const geometry::Rectangle &boundary, size_t capacity=10, size_t max_depth=8, size_t depth=0) | |
| Constructor. | |
| bool | insert (const T &object, const BoundingBoxFunc &get_bbox) |
| Insert object into this node or appropriate child. | |
| std::vector< T > | query_range (const geometry::Rectangle &range, const BoundingBoxFunc &get_bbox) const |
| Query objects in a rectangular range. | |
| std::vector< T > | query_point (const geometry::Point &point, const BoundingBoxFunc &get_bbox) const |
| Query objects containing a specific point. | |
| size_t | size () const |
| Get total number of objects in this subtree. | |
| void | clear () |
| Clear all objects and children. | |
| bool | is_divided () const |
| Check if this node has been subdivided. | |
| std::vector< T > | get_all_objects () const |
| Get all objects in this subtree. | |
| __init__ (self, Rectangle boundary, int capacity=10, int max_depth=8) | |
| None | subdivide (self) |
| bool | insert (self, Any obj, Rectangle bbox) |
| List[Any] | query_range (self, Rectangle range_bbox) |
| List[Any] | query_point (self, Point point) |
| List[Any] | get_all_objects (self) |
| int | size (self) |
Public Attributes | |
| geometry::Rectangle | boundary |
| Spatial boundary of this node. | |
| std::vector< T > | objects |
| Objects stored in this node. | |
| std::unique_ptr< QuadTreeNode > | children [4] |
| Child nodes (NW, NE, SW, SE) | |
| bool | divided = False |
| Whether this node has been subdivided. | |
| size_t | capacity |
| Maximum objects before subdivision. | |
| size_t | max_depth |
| Maximum subdivision depth. | |
| size_t | depth |
| Current depth in tree. | |
| boundary = boundary | |
| capacity = capacity | |
| max_depth = max_depth | |
| list | objects = [] |
| list | children = [] |
| objects | |
Protected Member Functions | |
| bool | _intersects_boundary (self, Rectangle bbox) |
Detailed Description
class zlayout::spatial::QuadTreeNode< T >
A node in the quadtree structure.
A node in the quadtree structure.
Represents a single node in the quadtree hierarchy. Each node can contain objects up to a specified capacity before subdividing into four child nodes.
Definition at line 28 of file quadtree.hpp.
Member Typedef Documentation
◆ BoundingBoxFunc
| using zlayout::spatial::QuadTreeNode< T >::BoundingBoxFunc = std::function<geometry::Rectangle(const T&)> |
Definition at line 31 of file quadtree.hpp.
◆ ObjectType
| using zlayout::spatial::QuadTreeNode< T >::ObjectType = T |
Definition at line 30 of file quadtree.hpp.
Constructor & Destructor Documentation
◆ QuadTreeNode()
| zlayout::spatial::QuadTreeNode< T >::QuadTreeNode | ( | const geometry::Rectangle & | boundary, |
| size_t | capacity = 10, | ||
| size_t | max_depth = 8, | ||
| size_t | depth = 0 ) |
Constructor.
- Parameters
-
boundary Spatial boundary for this node capacity Maximum objects before subdivision max_depth Maximum depth for subdivision depth Current depth (0 for root)
Definition at line 451 of file quadtree.hpp.
◆ __init__()
| zlayout.spatial.QuadTreeNode< T >.__init__ | ( | self, | |
| Rectangle | boundary, | ||
| int | capacity = 10, | ||
| int | max_depth = 8 ) |
Definition at line 12 of file spatial.py.
Member Function Documentation
◆ _intersects_boundary()
|
protected |
Check if bounding box intersects with this node's boundary.
Definition at line 105 of file spatial.py.

◆ clear()
| void zlayout::spatial::QuadTreeNode< T >::clear | ( | ) |
Clear all objects and children.
Definition at line 590 of file quadtree.hpp.
◆ get_all_objects() [1/2]
| List[Any] zlayout.spatial.QuadTreeNode< T >.get_all_objects | ( | self | ) |
Get all objects in this subtree.
Definition at line 109 of file spatial.py.
◆ get_all_objects() [2/2]
| std::vector< T > zlayout::spatial::QuadTreeNode< T >::get_all_objects | ( | ) | const |
Get all objects in this subtree.
Definition at line 601 of file quadtree.hpp.
◆ insert() [1/2]
| bool zlayout.spatial.QuadTreeNode< T >.insert | ( | self, | |
| Any | obj, | ||
| Rectangle | bbox ) |
Insert an object with its bounding box.
Definition at line 37 of file spatial.py.

◆ insert() [2/2]
| bool zlayout::spatial::QuadTreeNode< T >::insert | ( | const T & | object, |
| const BoundingBoxFunc & | get_bbox ) |
Insert object into this node or appropriate child.
- Parameters
-
object Object to insert get_bbox Function to get bounding box from object
- Returns
- true if successfully inserted
Definition at line 461 of file quadtree.hpp.
◆ is_divided()
|
inline |
Check if this node has been subdivided.
Definition at line 92 of file quadtree.hpp.
◆ query_point() [1/2]
| List[Any] zlayout.spatial.QuadTreeNode< T >.query_point | ( | self, | |
| Point | point ) |
Query all objects that contain the given point.
Definition at line 85 of file spatial.py.
◆ query_point() [2/2]
| std::vector< T > zlayout::spatial::QuadTreeNode< T >::query_point | ( | const geometry::Point & | point, |
| const BoundingBoxFunc & | get_bbox ) const |
Query objects containing a specific point.
- Parameters
-
point Query point get_bbox Function to get bounding box from object
- Returns
- Vector of objects containing the point
Definition at line 525 of file quadtree.hpp.

◆ query_range() [1/2]
| List[Any] zlayout.spatial.QuadTreeNode< T >.query_range | ( | self, | |
| Rectangle | range_bbox ) |
Query all objects that intersect with the given range.
Definition at line 65 of file spatial.py.
◆ query_range() [2/2]
| std::vector< T > zlayout::spatial::QuadTreeNode< T >::query_range | ( | const geometry::Rectangle & | range, |
| const BoundingBoxFunc & | get_bbox ) const |
Query objects in a rectangular range.
- Parameters
-
range Query rectangle get_bbox Function to get bounding box from object
- Returns
- Vector of objects intersecting the range
Definition at line 496 of file quadtree.hpp.

◆ size() [1/2]
| int zlayout.spatial.QuadTreeNode< T >.size | ( | self | ) |
Get total number of objects in this subtree.
Definition at line 119 of file spatial.py.
◆ size() [2/2]
| size_t zlayout::spatial::QuadTreeNode< T >::size | ( | ) | const |
Get total number of objects in this subtree.
Definition at line 579 of file quadtree.hpp.
◆ subdivide()
| None zlayout.spatial.QuadTreeNode< T >.subdivide | ( | self | ) |
Divide this node into four quadrants.
Definition at line 20 of file spatial.py.
Member Data Documentation
◆ boundary [1/2]
| zlayout.spatial.QuadTreeNode< T >.boundary = boundary |
Definition at line 13 of file spatial.py.
◆ boundary [2/2]
| geometry::Rectangle zlayout::spatial::QuadTreeNode< T >::boundary |
Spatial boundary of this node.
Definition at line 33 of file quadtree.hpp.
◆ capacity [1/2]
| zlayout.spatial.QuadTreeNode< T >.capacity = capacity |
Definition at line 14 of file spatial.py.
◆ capacity [2/2]
| size_t zlayout::spatial::QuadTreeNode< T >::capacity |
Maximum objects before subdivision.
Definition at line 37 of file quadtree.hpp.
◆ children [1/2]
| list zlayout.spatial.QuadTreeNode< T >.children = [] |
Definition at line 18 of file spatial.py.
◆ children [2/2]
| std::unique_ptr<QuadTreeNode> zlayout::spatial::QuadTreeNode< T >::children[4] |
Child nodes (NW, NE, SW, SE)
Definition at line 35 of file quadtree.hpp.
◆ depth
| size_t zlayout::spatial::QuadTreeNode< T >::depth |
Current depth in tree.
Definition at line 39 of file quadtree.hpp.
◆ divided
| bool zlayout::spatial::QuadTreeNode< T >::divided = False |
Whether this node has been subdivided.
Definition at line 36 of file quadtree.hpp.
◆ max_depth [1/2]
| zlayout.spatial.QuadTreeNode< T >.max_depth = max_depth |
Definition at line 15 of file spatial.py.
◆ max_depth [2/2]
| size_t zlayout::spatial::QuadTreeNode< T >::max_depth |
Maximum subdivision depth.
Definition at line 38 of file quadtree.hpp.
◆ objects [1/3]
| list zlayout.spatial.QuadTreeNode< T >.objects = [] |
Definition at line 16 of file spatial.py.
◆ objects [2/3]
| zlayout.spatial.QuadTreeNode< T >.objects |
Definition at line 44 of file spatial.py.
◆ objects [3/3]
| std::vector<T> zlayout::spatial::QuadTreeNode< T >::objects |
Objects stored in this node.
Definition at line 34 of file quadtree.hpp.
The documentation for this class was generated from the following files:
- include/zlayout/spatial/quadtree.hpp
- zlayout/spatial.py