Quadtree spatial index for efficient range and intersection queries. More...
#include <quadtree.hpp>
Classes | |
| struct | DetailedStatistics |
| Get detailed tree statistics. More... | |
| class | Iterator |
| Iterator support for tree traversal. More... | |
| struct | Statistics |
| Get tree statistics for performance analysis. More... | |
Public Types | |
| using | ObjectType = T |
| using | BoundingBoxFunc = std::function<geometry::Rectangle(const T&)> |
Public Member Functions | |
| QuadTree (const geometry::Rectangle &boundary, BoundingBoxFunc get_bbox, size_t capacity=10, size_t max_depth=8) | |
| Constructor. | |
| bool | insert (const T &object) |
| Insert object into quadtree. | |
| std::vector< T > | query_range (const geometry::Rectangle &range) const |
| Query objects in rectangular range. | |
| std::vector< T > | query_point (const geometry::Point &point) const |
| Query objects containing a specific point. | |
| std::vector< T > | query_nearby (const T &target, double distance) const |
| Find objects within distance of target object. | |
| std::vector< std::pair< T, T > > | find_potential_intersections () const |
| Find all potentially intersecting pairs of objects. | |
| std::vector< std::pair< T, T > > | find_intersections (std::function< bool(const T &, const T &)> collision_func) const |
| Find intersecting objects using efficient spatial queries. | |
| size_t | size () const |
| Get total number of objects in tree. | |
| bool | empty () const |
| Check if tree is empty. | |
| void | clear () |
| Clear all objects from tree. | |
| Statistics | get_statistics () const |
| Calculate tree statistics. | |
| const QuadTreeNode< T > * | get_root () const |
| Get root node (for visualization/debugging) | |
| void | rebuild (size_t new_capacity, size_t new_max_depth) |
| Rebuild tree with new parameters. | |
| bool | remove (const T &object) |
| Remove object from tree. | |
| bool | update (const T &old_object, const T &new_object) |
| Update object position (remove and re-insert) | |
| size_t | batch_insert (const std::vector< T > &objects) |
| Batch insert multiple objects efficiently. | |
| size_t | batch_remove (const std::vector< T > &objects) |
| Batch remove multiple objects efficiently. | |
| Iterator | begin () const |
| Get iterator to beginning of tree. | |
| Iterator | end () const |
| Get iterator to end of tree. | |
| bool | contains (const T &object) const |
| Check if object exists in tree. | |
| std::vector< T > | get_all_objects () const |
| Get all objects in tree as vector. | |
| std::vector< T > | query_circle (const geometry::Point ¢er, double radius) const |
| Get objects within circular range. | |
| std::vector< T > | query_k_nearest (const T &target, size_t k) const |
| Get k nearest neighbors to target object. | |
| void | optimize () |
| Optimize tree structure for better performance This rebuilds the tree with better parameters based on current data. | |
| DetailedStatistics | get_detailed_statistics () const |
| Get detailed statistics about tree structure. | |
| bool | merge (const QuadTree &other) |
| Merge another quadtree into this one. | |
| std::vector< std::unique_ptr< QuadTree > > | split_by_regions (const std::vector< geometry::Rectangle > ®ions) const |
| Split tree into multiple subtrees based on spatial regions. | |
| bool | validate () const |
| Validate tree structure integrity. | |
| std::string | to_string () const |
| Get tree as string representation (for debugging) | |
| void | set_statistics_collection (bool enable) |
| Enable/disable statistics collection. | |
| double | get_load_factor () const |
| Get current load factor of the tree. | |
| __init__ (self, Rectangle boundary, int capacity=10, int max_depth=8) | |
| bool | insert (self, Any obj, Optional[Rectangle] bbox=None) |
| List[Any] | query_range (self, Rectangle range_bbox) |
| List[Any] | query_point (self, Point point) |
| List[Tuple[Any, Any]] | find_intersections (self) |
| List[Any] | find_nearby_objects (self, Any obj, float distance) |
| int | size (self) |
| None | clear (self) |
Public Attributes | |
| root = QuadTreeNode(boundary, capacity, max_depth) | |
| int | object_count = 0 |
Protected Member Functions | |
| List[Tuple[Any, Rectangle]] | _get_all_object_bbox_pairs (self) |
| List[Tuple[Any, Rectangle]] | _collect_object_bbox_pairs (self, QuadTreeNode node) |
Detailed Description
class zlayout::spatial::QuadTree< T >
Quadtree spatial index for efficient range and intersection queries.
Quadtree spatial index for efficient range and intersection queries.
High-performance spatial data structure that partitions 2D space recursively into quadrants. Optimizes range queries, nearest neighbor searches, and intersection detection for large numbers of geometric objects.
Definition at line 120 of file quadtree.hpp.
Member Typedef Documentation
◆ BoundingBoxFunc
| using zlayout::spatial::QuadTree< T >::BoundingBoxFunc = std::function<geometry::Rectangle(const T&)> |
Definition at line 123 of file quadtree.hpp.
◆ ObjectType
| using zlayout::spatial::QuadTree< T >::ObjectType = T |
Definition at line 122 of file quadtree.hpp.
Constructor & Destructor Documentation
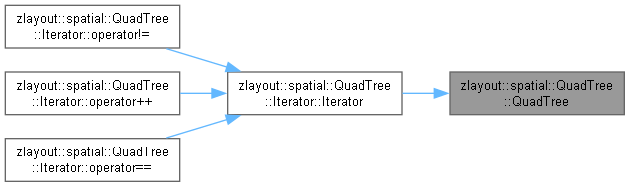
◆ QuadTree()
| zlayout::spatial::QuadTree< T >::QuadTree | ( | const geometry::Rectangle & | boundary, |
| BoundingBoxFunc | get_bbox, | ||
| size_t | capacity = 10, | ||
| size_t | max_depth = 8 ) |
Constructor.
- Parameters
-
boundary World boundary for the quadtree get_bbox Function to extract bounding box from objects capacity Maximum objects per node before subdivision max_depth Maximum subdivision depth
Definition at line 613 of file quadtree.hpp.
◆ __init__()
| zlayout.spatial.QuadTree< T >.__init__ | ( | self, | |
| Rectangle | boundary, | ||
| int | capacity = 10, | ||
| int | max_depth = 8 ) |
Definition at line 131 of file spatial.py.
Member Function Documentation
◆ _collect_object_bbox_pairs()
|
protected |
Recursively collect all object-bbox pairs.
Definition at line 204 of file spatial.py.

◆ _get_all_object_bbox_pairs()
|
protected |
Get all (object, bbox) pairs from the tree.
Definition at line 200 of file spatial.py.

◆ batch_insert()
| size_t zlayout::spatial::QuadTree< T >::batch_insert | ( | const std::vector< T > & | objects | ) |
Batch insert multiple objects efficiently.
- Parameters
-
objects Vector of objects to insert
- Returns
- Number of objects successfully inserted
Definition at line 744 of file quadtree.hpp.
◆ batch_remove()
| size_t zlayout::spatial::QuadTree< T >::batch_remove | ( | const std::vector< T > & | objects | ) |
Batch remove multiple objects efficiently.
- Parameters
-
objects Vector of objects to remove
- Returns
- Number of objects successfully removed
Definition at line 758 of file quadtree.hpp.
◆ begin()
| QuadTree< T >::Iterator zlayout::spatial::QuadTree< T >::begin | ( | ) | const |
Get iterator to beginning of tree.
Definition at line 772 of file quadtree.hpp.
◆ clear() [1/2]
| None zlayout.spatial.QuadTree< T >.clear | ( | self | ) |
Remove all objects from the tree.
Definition at line 218 of file spatial.py.
◆ clear() [2/2]
| void zlayout::spatial::QuadTree< T >::clear | ( | ) |
Clear all objects from tree.
Definition at line 674 of file quadtree.hpp.
◆ contains()
| bool zlayout::spatial::QuadTree< T >::contains | ( | const T & | object | ) | const |
Check if object exists in tree.
- Parameters
-
object Object to find
- Returns
- true if object exists
Definition at line 782 of file quadtree.hpp.

◆ empty()
|
inline |
Check if tree is empty.
Definition at line 198 of file quadtree.hpp.
◆ end()
| QuadTree< T >::Iterator zlayout::spatial::QuadTree< T >::end | ( | ) | const |
Get iterator to end of tree.
Definition at line 777 of file quadtree.hpp.
◆ find_intersections() [1/2]
| List[Tuple[Any, Any]] zlayout.spatial.QuadTree< T >.find_intersections | ( | self | ) |
Find all pairs of objects that potentially intersect.
Definition at line 164 of file spatial.py.
◆ find_intersections() [2/2]
| std::vector< std::pair< T, T > > zlayout::spatial::QuadTree< T >::find_intersections | ( | std::function< bool(const T &, const T &)> | collision_func | ) | const |
Find intersecting objects using efficient spatial queries.
- Parameters
-
collision_func Function to test actual collision between objects
- Returns
- Vector of intersecting object pairs
Definition at line 666 of file quadtree.hpp.
◆ find_nearby_objects()
| List[Any] zlayout.spatial.QuadTree< T >.find_nearby_objects | ( | self, | |
| Any | obj, | ||
| float | distance ) |
Find objects within a certain distance of the given object.
Definition at line 180 of file spatial.py.
◆ find_potential_intersections()
| std::vector< std::pair< T, T > > zlayout::spatial::QuadTree< T >::find_potential_intersections | ( | ) | const |
Find all potentially intersecting pairs of objects.
- Returns
- Vector of object pairs that might intersect
Definition at line 659 of file quadtree.hpp.
◆ get_all_objects()
| std::vector< T > zlayout::spatial::QuadTree< T >::get_all_objects | ( | ) | const |
Get all objects in tree as vector.
- Returns
- Vector containing all objects
Definition at line 789 of file quadtree.hpp.
◆ get_detailed_statistics()
| QuadTree< T >::DetailedStatistics zlayout::spatial::QuadTree< T >::get_detailed_statistics | ( | ) | const |
Get detailed statistics about tree structure.
Definition at line 884 of file quadtree.hpp.

◆ get_load_factor()
| double zlayout::spatial::QuadTree< T >::get_load_factor | ( | ) | const |
Get current load factor of the tree.
- Returns
- Load factor (0.0 to 1.0)
Definition at line 982 of file quadtree.hpp.

◆ get_root()
|
inline |
Get root node (for visualization/debugging)
Definition at line 225 of file quadtree.hpp.
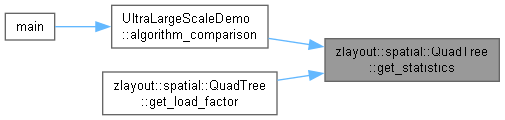
◆ get_statistics()
| QuadTree< T >::Statistics zlayout::spatial::QuadTree< T >::get_statistics | ( | ) | const |
Calculate tree statistics.
Definition at line 682 of file quadtree.hpp.
◆ insert() [1/2]
| bool zlayout.spatial.QuadTree< T >.insert | ( | self, | |
| Any | obj, | ||
| Optional[Rectangle] | bbox = None ) |
Insert an object. If bbox is not provided, try to get it from the object.
Definition at line 135 of file spatial.py.
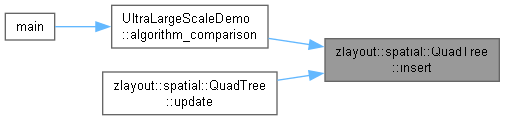
◆ insert() [2/2]
| bool zlayout::spatial::QuadTree< T >::insert | ( | const T & | object | ) |
Insert object into quadtree.
- Parameters
-
object Object to insert
- Returns
- true if successfully inserted
Definition at line 627 of file quadtree.hpp.
◆ merge()
| bool zlayout::spatial::QuadTree< T >::merge | ( | const QuadTree< T > & | other | ) |
Merge another quadtree into this one.
- Parameters
-
other QuadTree to merge
- Returns
- true if merge was successful
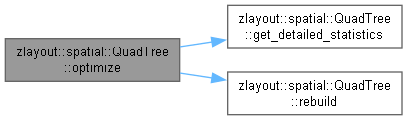
◆ optimize()
| void zlayout::spatial::QuadTree< T >::optimize | ( | ) |
Optimize tree structure for better performance This rebuilds the tree with better parameters based on current data.
Definition at line 872 of file quadtree.hpp.
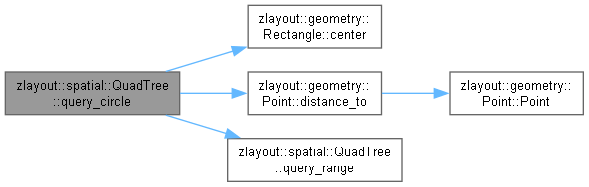
◆ query_circle()
| std::vector< T > zlayout::spatial::QuadTree< T >::query_circle | ( | const geometry::Point & | center, |
| double | radius ) const |
Get objects within circular range.
- Parameters
-
center Center point of search radius Search radius
- Returns
- Vector of objects within radius
Definition at line 811 of file quadtree.hpp.
◆ query_k_nearest()
| std::vector< T > zlayout::spatial::QuadTree< T >::query_k_nearest | ( | const T & | target, |
| size_t | k ) const |
Get k nearest neighbors to target object.
- Parameters
-
target Target object k Number of neighbors to find
- Returns
- Vector of k nearest objects
Definition at line 831 of file quadtree.hpp.
◆ query_nearby()
| std::vector< T > zlayout::spatial::QuadTree< T >::query_nearby | ( | const T & | target, |
| double | distance ) const |
Find objects within distance of target object.
- Parameters
-
target Target object distance Maximum distance
- Returns
- Vector of nearby objects
Definition at line 652 of file quadtree.hpp.
◆ query_point() [1/2]
| List[Any] zlayout.spatial.QuadTree< T >.query_point | ( | self, | |
| Point | point ) |
Find all objects that contain the given point.
Definition at line 160 of file spatial.py.
◆ query_point() [2/2]
| std::vector< T > zlayout::spatial::QuadTree< T >::query_point | ( | const geometry::Point & | point | ) | const |
Query objects containing a specific point.
- Parameters
-
point Query point
- Returns
- Vector of objects containing the point
Definition at line 645 of file quadtree.hpp.
◆ query_range() [1/2]
| List[Any] zlayout.spatial.QuadTree< T >.query_range | ( | self, | |
| Rectangle | range_bbox ) |
Find all objects that intersect with the given range.
Definition at line 156 of file spatial.py.
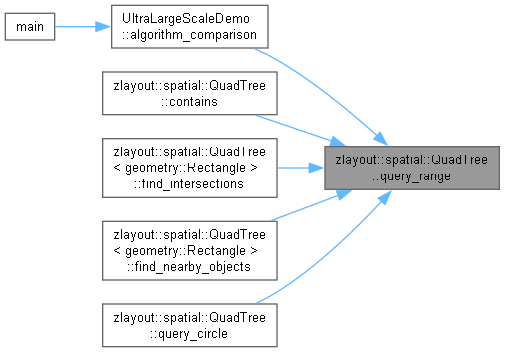
◆ query_range() [2/2]
| std::vector< T > zlayout::spatial::QuadTree< T >::query_range | ( | const geometry::Rectangle & | range | ) | const |
Query objects in rectangular range.
- Parameters
-
range Query rectangle
- Returns
- Vector of objects intersecting the range
Definition at line 638 of file quadtree.hpp.
◆ rebuild()
| void zlayout::spatial::QuadTree< T >::rebuild | ( | size_t | new_capacity, |
| size_t | new_max_depth ) |
Rebuild tree with new parameters.
Definition at line 694 of file quadtree.hpp.

◆ remove()
| bool zlayout::spatial::QuadTree< T >::remove | ( | const T & | object | ) |
Remove object from tree.
- Parameters
-
object Object to remove
- Returns
- true if object was found and removed
Definition at line 700 of file quadtree.hpp.

◆ set_statistics_collection()
|
inline |
Enable/disable statistics collection.
- Parameters
-
enable Whether to collect detailed statistics
Definition at line 377 of file quadtree.hpp.
◆ size() [1/2]
| int zlayout.spatial.QuadTree< T >.size | ( | self | ) |
Get total number of objects in the tree.
Definition at line 214 of file spatial.py.
◆ size() [2/2]
|
inline |
Get total number of objects in tree.
Definition at line 193 of file quadtree.hpp.
◆ split_by_regions()
| std::vector< std::unique_ptr< QuadTree > > zlayout::spatial::QuadTree< T >::split_by_regions | ( | const std::vector< geometry::Rectangle > & | regions | ) | const |
Split tree into multiple subtrees based on spatial regions.
- Parameters
-
regions Vector of rectangular regions to split into
- Returns
- Vector of new QuadTrees for each region
◆ to_string()
| std::string zlayout::spatial::QuadTree< T >::to_string | ( | ) | const |
Get tree as string representation (for debugging)
Definition at line 960 of file quadtree.hpp.
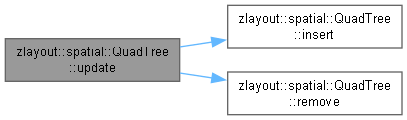
◆ update()
| bool zlayout::spatial::QuadTree< T >::update | ( | const T & | old_object, |
| const T & | new_object ) |
Update object position (remove and re-insert)
- Parameters
-
old_object Object to update new_object New object data
- Returns
- true if update was successful
Definition at line 734 of file quadtree.hpp.
◆ validate()
| bool zlayout::spatial::QuadTree< T >::validate | ( | ) | const |
Validate tree structure integrity.
- Returns
- true if tree structure is valid
Definition at line 931 of file quadtree.hpp.
Member Data Documentation
◆ object_count
| int zlayout.spatial.QuadTree< T >.object_count = 0 |
Definition at line 133 of file spatial.py.
◆ root
| zlayout.spatial.QuadTree< T >.root = QuadTreeNode(boundary, capacity, max_depth) |
Definition at line 132 of file spatial.py.
The documentation for this class was generated from the following files:
- include/zlayout/spatial/quadtree.hpp
- zlayout/spatial.py